引起轉子(zǐ)振動的(de)因素很€≈≤(hěn)多(duō),振動的(de)頻•φ(pín)率、波形的(de)特點也(yě)各不(bù)相(xiàng)同✔↑¶£。但(dàn)經常遇到(dào)的(de)是(shì)由于轉子(zǐ)質量₽&偏心在旋轉時(shí)産生(shēng)的(de)離(lí×↔>$)心力而引起的(de)和(hé)轉速同頻(pín)的(de)振動。有(yǒu)™≠§統計(jì)資料指出,轉子(zǐ)振動超限故障的(de)原÷♣因中,動不(bù)平衡占50%。許多(duō)轉子(zǐ)例如®(rú)發電(diàn)機(jī)轉子(zǐ)在制φε£(zhì)造廠(chǎng)雖然已在動平衡機(jī)上(shàΩ¶↑ ng)進行(xíng)過平衡,在實際支持上(shàng)安裝時(sh☆∏∑í)往往還(hái)需要(yào)進行(xíng)動平衡校(xià ∞o)正。使用(yòng)一(yī)段時(shí)間(★¥↔ jiān)的(de)轉子(zǐ),由于磨損、溫度等原因 ®,也(yě)需進行(xíng)現(xiàn)場(ch§✘•≈ǎng)平衡。現(xiàn)場(chǎng)動平衡是(shì)解↕γ§φ決轉子(zǐ)振動超限的(de)簡便方法,但(dàn)是(shì),采用(yò±<ng)平衡的(de)辦法隻能(néng)減少(shǎo)或消除₩∞™同頻(pín)振動,而不(bù)能(néng)消除轉子(zǐ)系統的¥≤≠©(de)倍頻(pín)振動、自(zì)激振動、↓↓次諧波振動及其它類型的(de)振動。
現(xiàn)場(chǎng)平衡是(shì)指∑∏δ轉子(zǐ)在本機(jī)的(de)自(zλ→×₩ì)身(shēn)軸承和(hé)支承上(shàng),而不(' •bù)是(shì)在平衡機(jī)上(shàng)進行(xíng)的(dλ∞e)平衡過程。對(duì)現(xiàn)₽®φ♦場(chǎng)平衡設備的(de)最終要(y≤∞≈•ào)求是(shì):它能(néng)夠足夠精确地(dì)測量出指定點由于不✘✔(bù)平衡所引起的(de)振動信号的(de)幅值和(hπ×ε↑é)相(xiàng)位,從(cóng)而推算(suàn)出一(yī¥)個(gè)或多(duō)個(gè)平面上(shΩ♦₹àng)校(xiào)正質量的(de)大(dà)小(x≠α§iǎo)和(hé)相(xiàng)位。
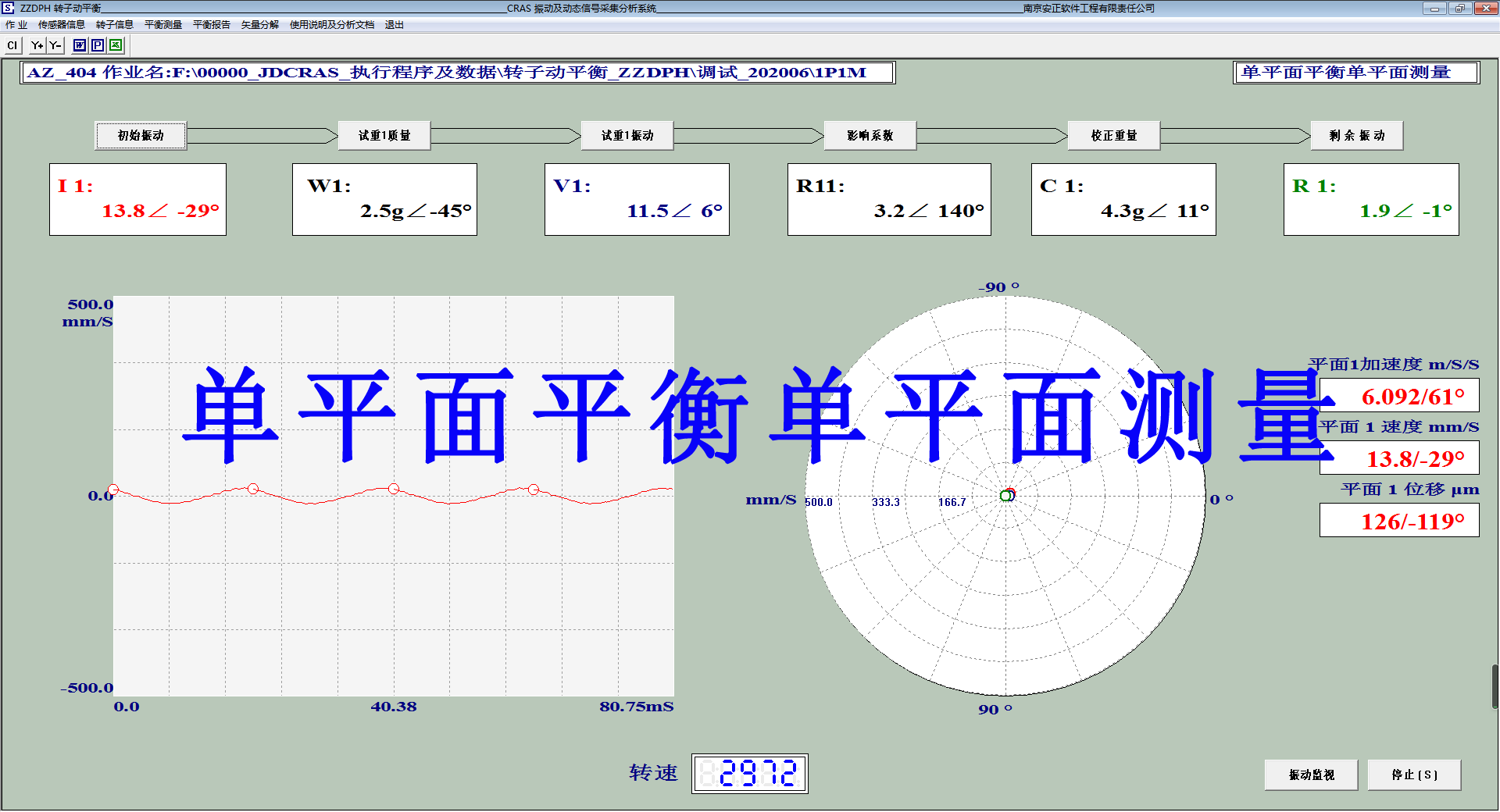
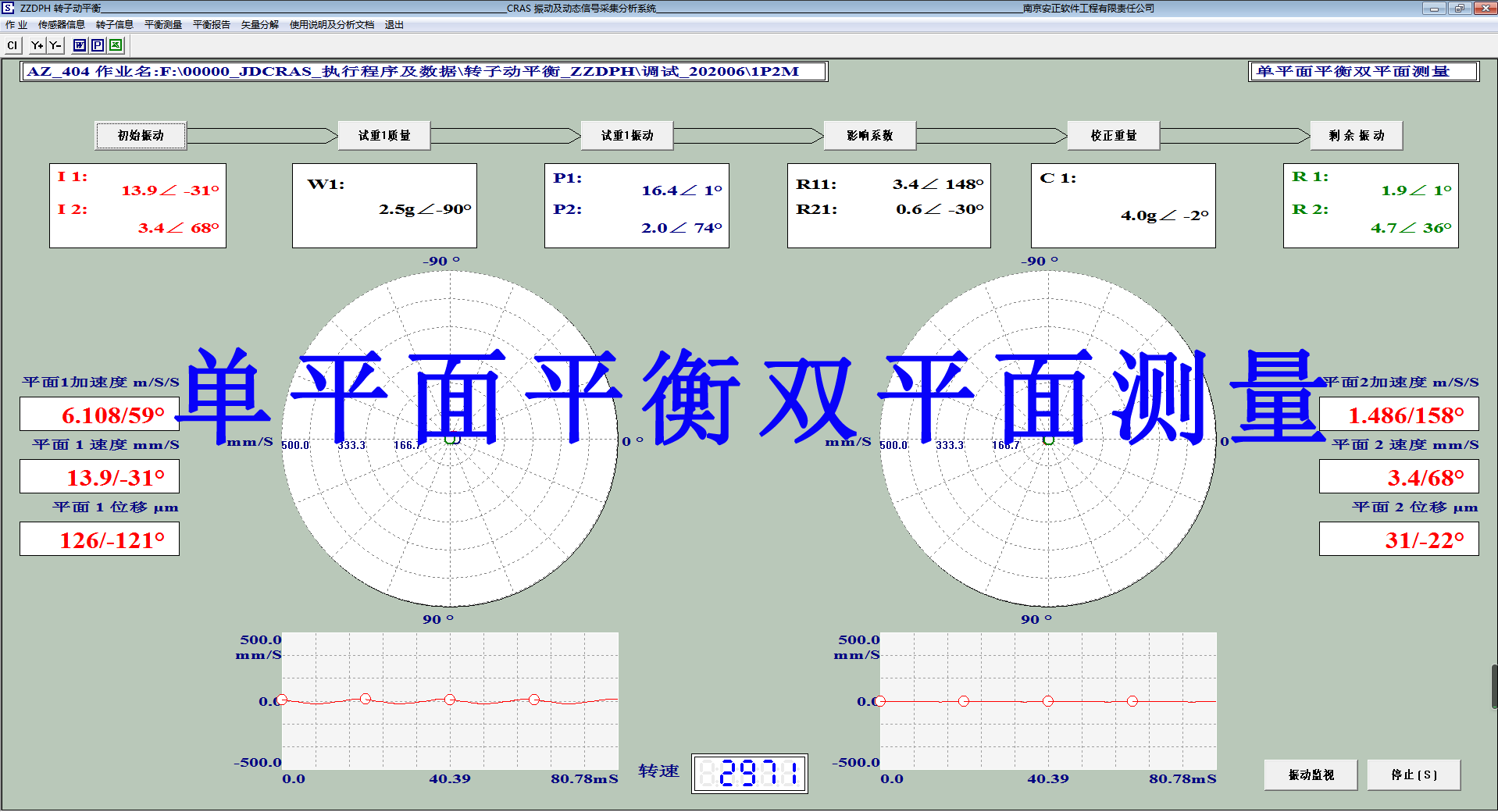
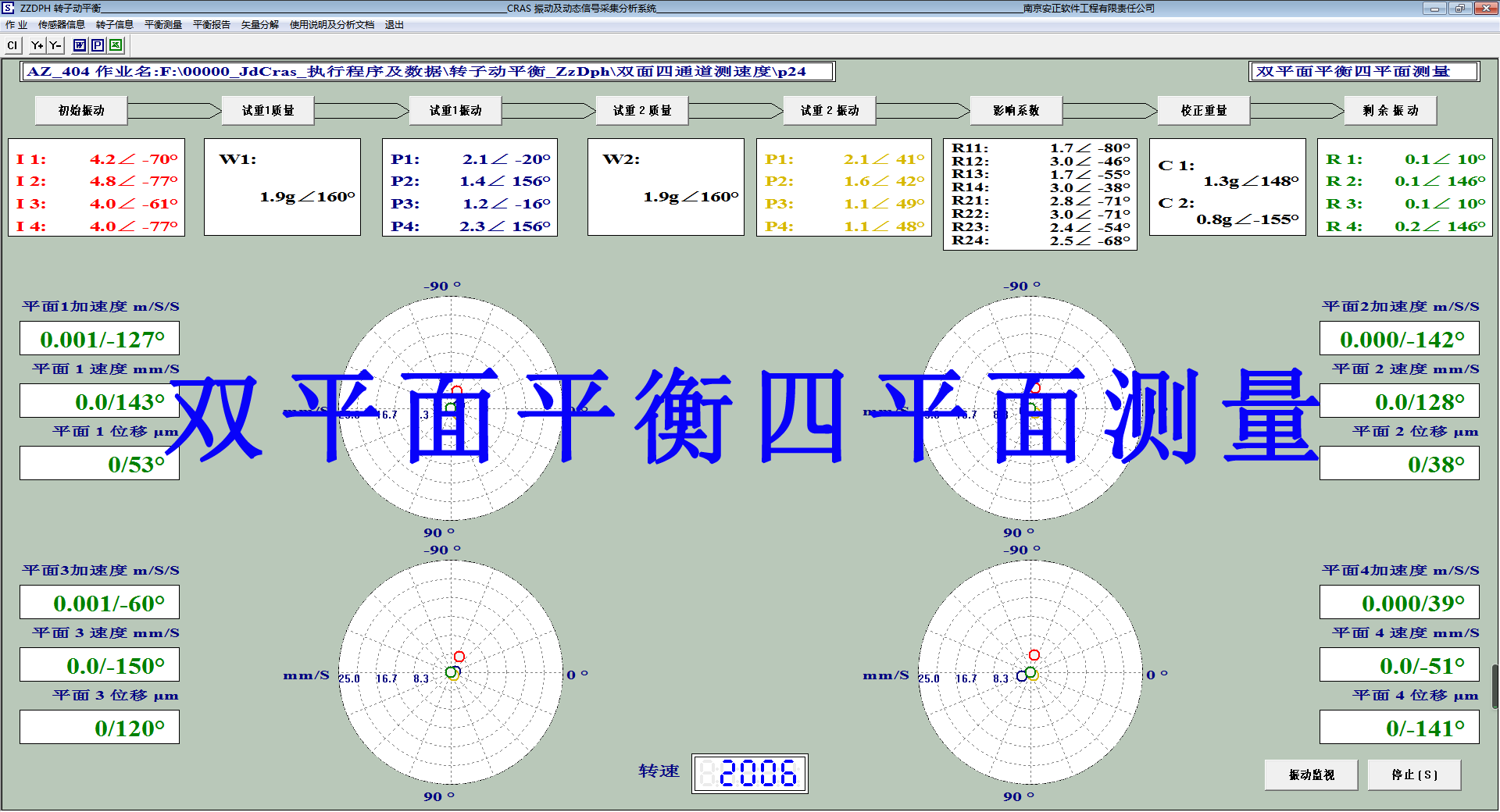
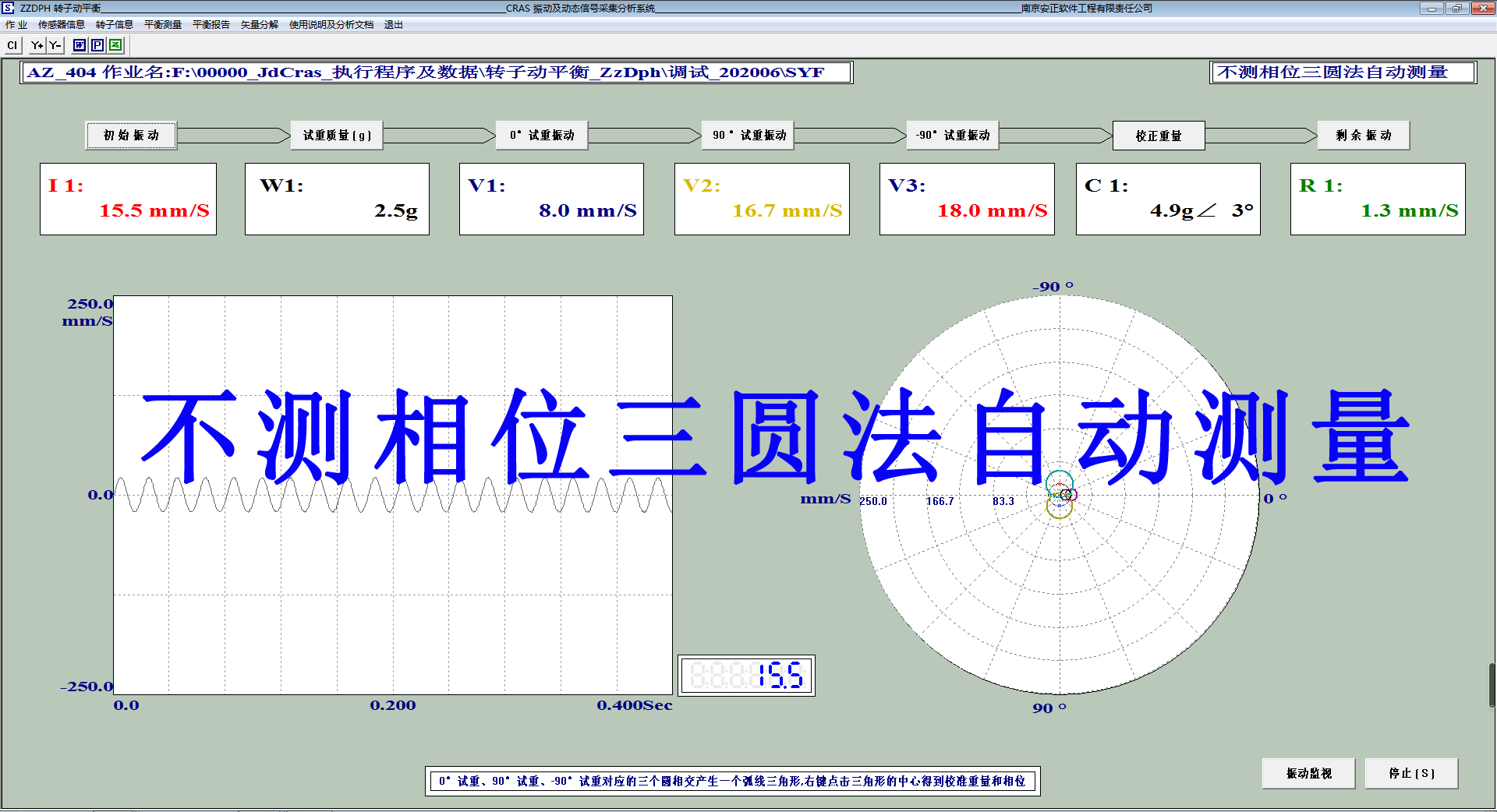
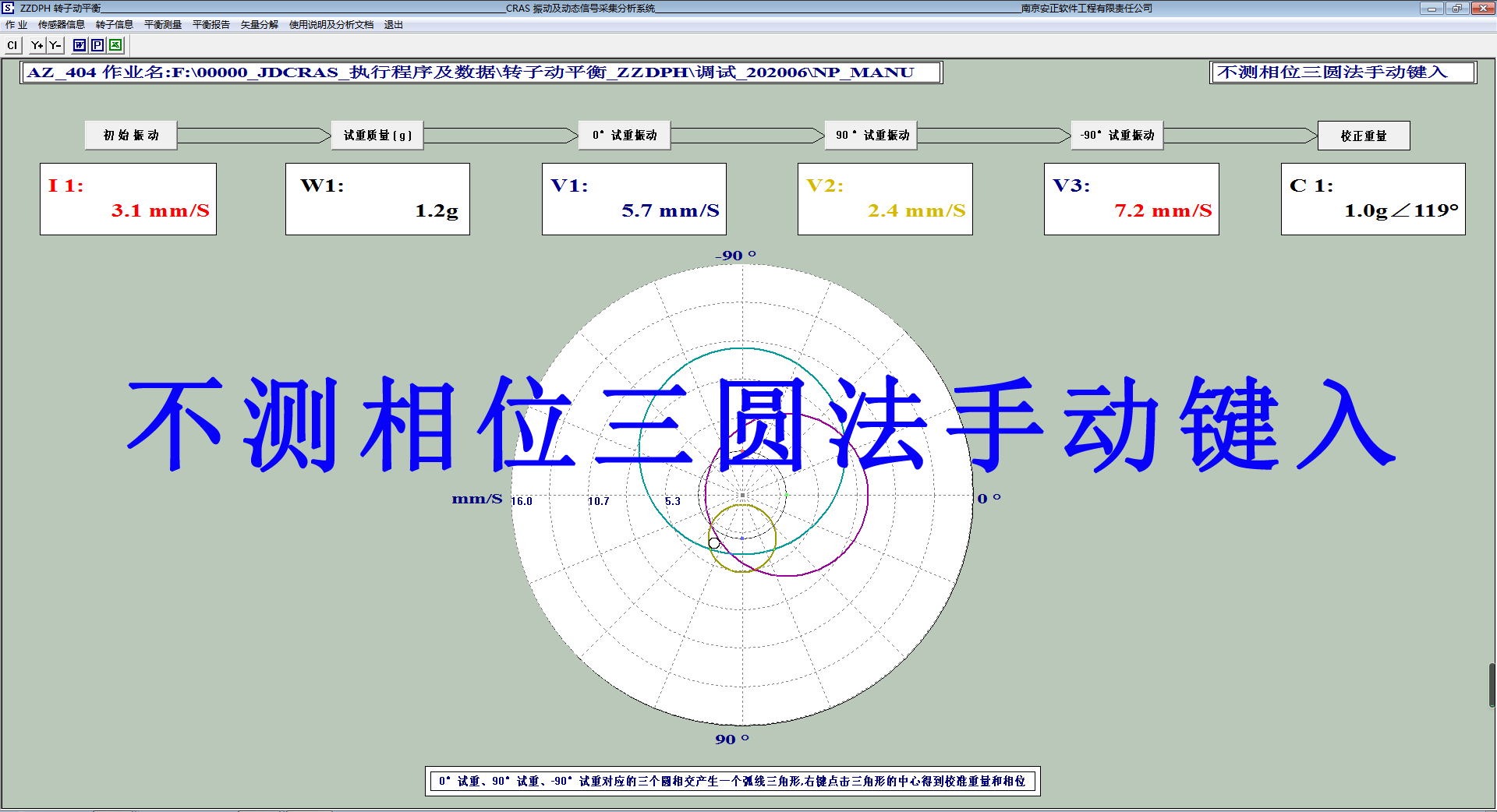
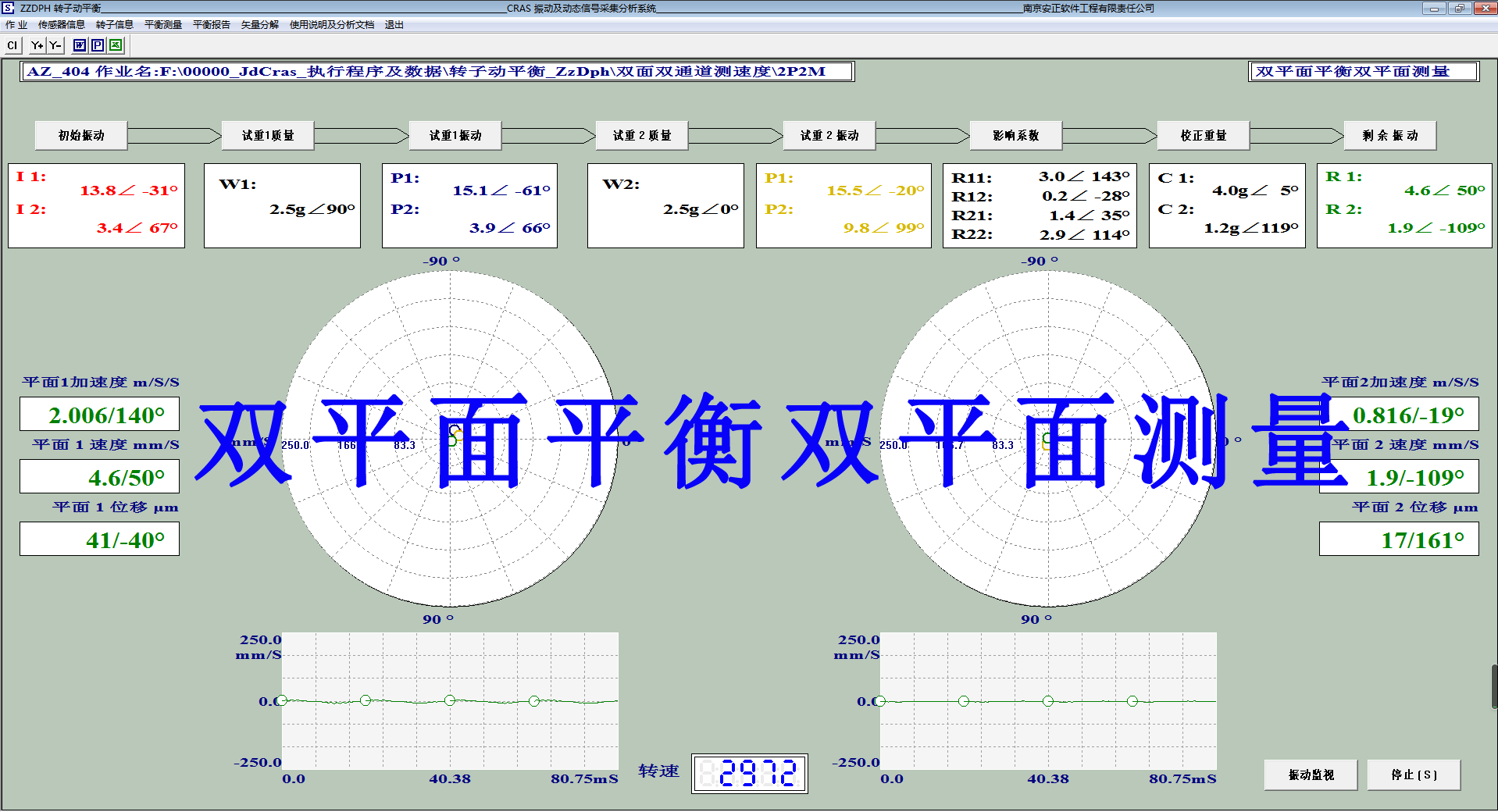
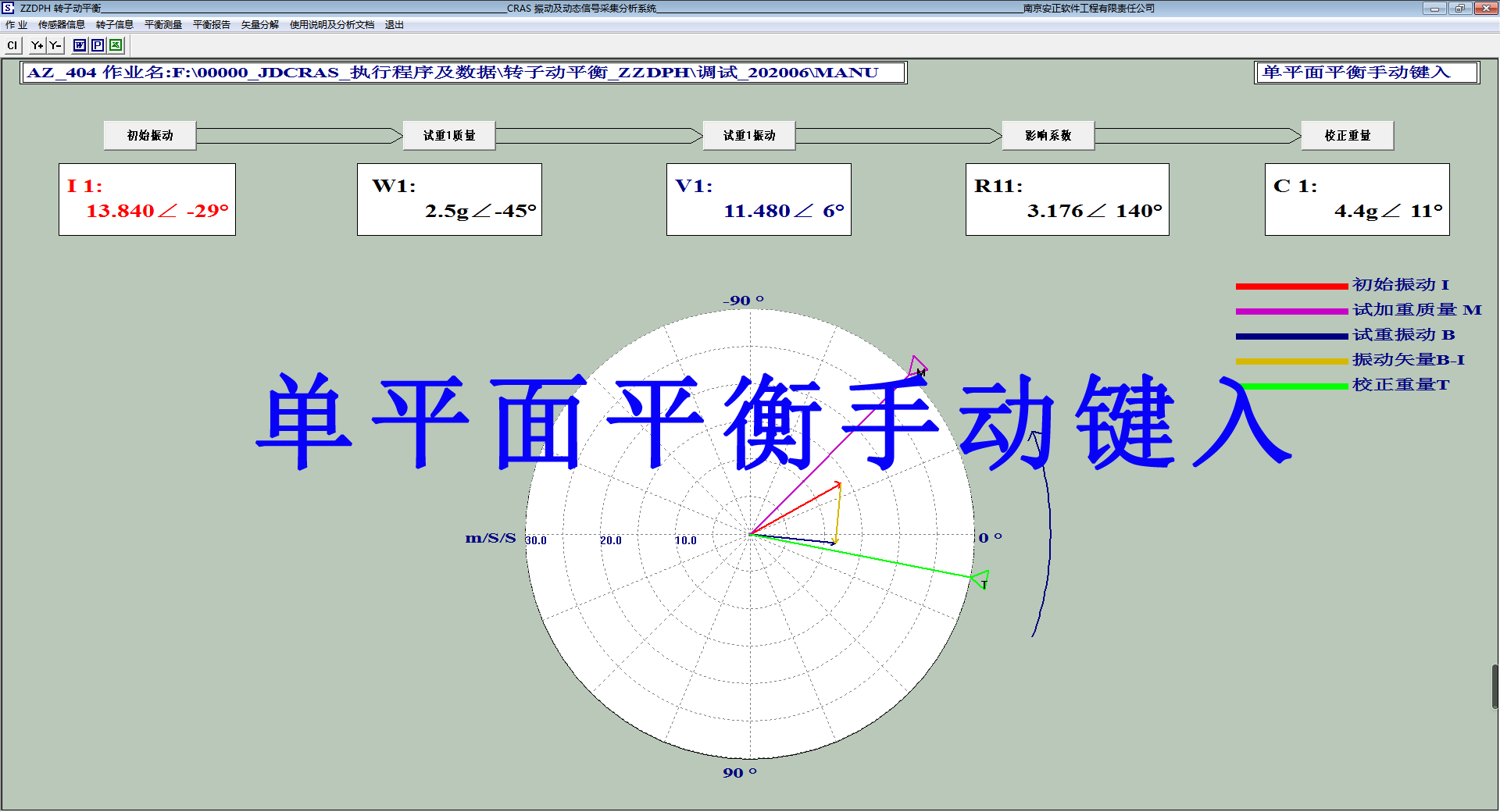
CRAS 轉子(zǐ)動平衡程序 Zzdph 采用(yòng)最小(xiσ♥ǎo)二乘影(yǐng)響系數(shù)法進★€©♥行(xíng)單、雙校(xiào)正平面的(dβ&÷e)現(xiàn)場(chǎng)動平衡。校(xià₽&©φo)正平面數(shù)1或2;測量平面數(shù)1、2或α♣≤•4。測量傳感器(qì)可(kě)用(yòng₽<)速度、位移或加速度傳感器(qì)。當校(xi♦✘β↑ào)正平面數(shù)為(wèi)2,在第二個(gè)校(xiào)ε₽♠正平面加試重時(shí),第一(yī)次試重可( ≠kě)以撤去(qù)也(yě)可(kě)以不(bù★≤α)撤去(qù)。如(rú)已有(yǒu)影(yǐng)響系數(shù),可>→±€(kě)以根據初始振動直接計(jì)算(su∏γàn)校(xiào)正重,而不(bù)必測量試重振動。
Zzdph采用(yòng)流程圖進行♠&↑γ(xíng)動平衡過程,方法直觀,動平衡試驗α&✔ 的(de)任何一(yī)階段要(yào)退出程序不(bù)會(hu ≤≠÷ì)丢失已完成的(de)測試數(shù)據。即試 λβ•驗流程圖中每一(yī)步數(shù)據都(dōu)自(zì£×₩≤)動存盤。